计算机图形学笔记——矩阵
Posted on 周二 02 二月 2016 in 计算机图形学
计算机图形学笔记——矩阵
@(计算机图形学)[学习笔记]
[TOC]
在游戏编程过程中,如果要操作一个物体,我们会使用各种矩阵。下面来说一下这些矩阵是如何起作用的。
矩阵与坐标变换
在图像的绘制过程中,矩阵主要是用来进行坐标变换。我们先来看下面的推导。
- 要得到任意坐标系1中的某个点[a, b, c],可以让原点先在x轴位移[a, 0, 0], 再在y轴上位移[0, b, 0],最后在z轴上位移[0, 0, c]。将这三个方向的单位向量定义为\(p,q,r\), 可以得到推导中的(1)。
- p,q,r是坐标系2中的某个向量,如推导中的(2)
- 计算后得到推导结果(4),该结果就是坐标系1中的向量[a, b, c]在坐标系2中的表示
从最终的结果可以看出,将一个坐标系1中的向量变换到坐标系2中,只需要右乘一个矩阵即可。再看这个矩阵的内容,我们发现它的每一行就是坐标系1中的坐标轴方向的单位向量在坐标系2中的表示。
在二维笛卡尔坐标系下来看一下实例:
对于物体坐标系,它的坐标轴的单位向量在世界坐标系中分别为:p=[2, 1], q=[-1, 2]:
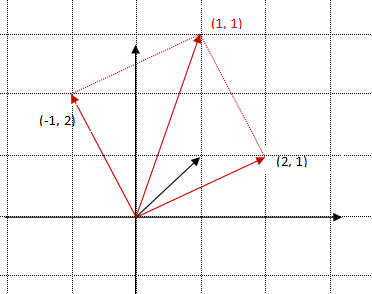
那么对于物体坐标系中的某个点[1, 1],变换到世界坐标系中为:
我们发现,从物体坐标系到世界坐标系的变换,是物体坐标系进行了缩小,和顺时针旋转, 但对于绘制出来的图像对于世界坐标系却是放大和逆时针旋转。在计算机绘制图形的时候,就是通过变换坐标系来进行图像的缩放和旋转的。
矩阵变换的应用
计算时,可以通过预先得出的变换矩阵来使流程简化。下面列一下各种变换矩阵。
缩放
二维与三维的缩放矩阵:
其中n为缩放方向,k为缩放因子。
旋转
二维坐标系中的绕圆心旋转和三维坐标系中绕某个向量旋转
正交投影
投影其实就是缩放。向某个平面投影,就是物体在该平面的法向量上的缩放为0。
镜像
镜像也是缩放。物体对于某个平面的镜像,就是该物品在平面法向量上的缩放为-1。例如在Unity2D中,如果将某个精灵的轴的缩放设为-1,那么会得到一个镜像精灵。
平移与齐次坐标
从上面的内容可知,将某一个向量平移,可以加上一个矩阵;将一个物体缩放或旋转,可以右乘一个矩阵:
\(p_1 = pM_1 + M_2\)
其中M1是缩放旋转矩阵,M2是位移矩阵。如果经过多次这样的变换的话,会产生很多的代数项,齐次坐标就是用来解决这个问题的。
所谓齐次坐标就是用n+1个分量来表示n维坐标。例如:二维平面上的点\(A(x , y)\)用齐次坐标表示为\((h_x , h_y , h)\);三维空间中的点\(B(x , y , z)\)用齐次坐标表示为\((h_x , h_y , h_z , h)\)。一个向量的齐次表示并不是唯一的,齐次坐标中的h取不同值表示的都是同一个点,比如\((8 , 4 , 2)\)、\((4 , 2 , 1)\)表示的都是二维平面上的点\((4 , 2)\)。下面来看一个等式:
可以看出,一个点的位移,可以用齐次坐标的右乘来表示。
矩阵的缺点
- 不直观
- 数据冗余
- 大量矩阵相乘容易产生坏数据
欧拉角
在三维坐标系中,要转动某个物体,可以通过依次绕其各个轴旋转来实现。那么表示一个物体的方位,就可以通过这三个角来表示。 欧拉角表示的是物体的最终方位而不是旋转过程。例如我们说将一个物体旋转到\((ψ, θ, φ)\),这个方位是相对于物体未旋转时的角度,而不是将当前物体绕z轴旋转ψ, 绕x轴旋转θ, 绕y轴旋转φ。
万向节运动
因为用欧拉角表示方位与旋转的次序无关。unity中默认的是z-x-y,这样的次序就导致了z轴的旋转会影响x,y轴的旋转,x轴的旋转会影响y轴的旋转。 这样的旋转类似于万向节的运动。
万向锁
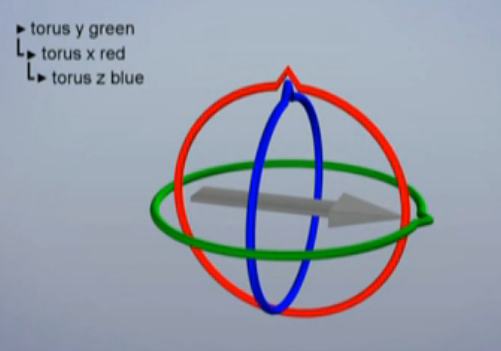
假设物体按heading-pitch-bank的方式旋转,例如在下面的示例中,绿色圈代表y轴的旋转,红色圈代表x轴的旋转,蓝色轴代表z轴的旋转。初始状态如下图:
当绕x轴旋转90度时,发现此时的z轴和以前y轴重合了。
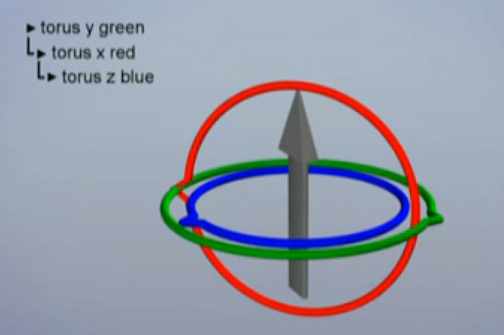
这就意味着,最开始的y轴旋转和此时的z轴旋转是等效的,z轴的旋转可以通过y轴的旋转来实现,可以被认为是无效的。那么欧拉角就损失了一个维度。例如在Unity 3D中:
方位一致
插值计算
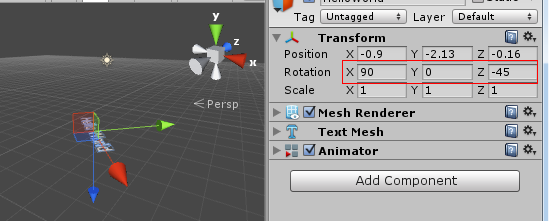
欧拉角对计算物体旋转差值产生影响。以Unity3D为例。
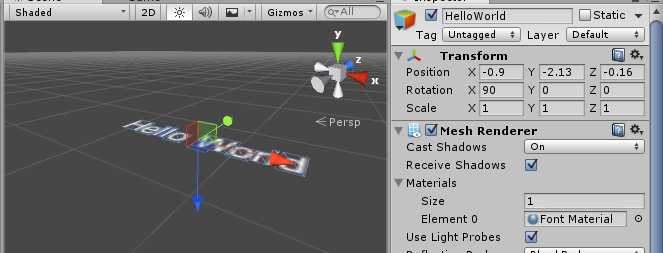
假如一个物体的初始方位为(90, 0, 0),
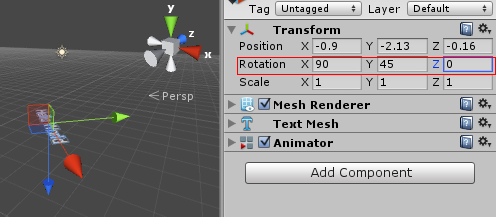
要旋转到(0, 90, 90)
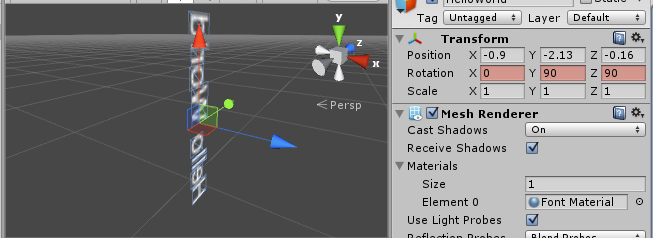
直观上看,就是将HelloWord立起来。但却有三个坐标轴做了旋转,通过分析其中的插值可以看到,它运动的路径和我们期望的路径并不一样。
计算错误的原因:因为是以万向节的形式旋转,物体旋转到某个位置,有可能需要同时旋转两个或三个坐标轴。此时真正的球面差值和欧拉角的差值不同。旋转依赖的参数太多。
复数与旋转
要解决差值问题,还是要减少旋转依赖的参数。但矩阵的数据太冗余,好在数学家们发现如下规律: 对于复数:
\( p = x + yi $ $ q = cosθ + i sinθ\) $ pq = (x + yi)(cosθ + isinθ) = (xcosθ - ysinθ) + (xsinθ+ ycosθ)i $
这对于上面的旋转矩阵是不是很像?只要将复数的实部和虚部看做坐标轴,那么p可以看做一个向量,pq就可以看p成旋转θ角之后的向量。
四元数
相对于二维坐标中的复数,数学家还定义了三维坐标中的四元数:
\(p = w + xi + yj + zk\)
其中:
\(i^2 = j^2 = k^2 = -1\) \(ij = k, ji = -k\) \(jk = i, kj = -i\) \(ki = j, ik = -j\)
设四元数:
\( q = [cos(\theta /2), nsin(\theta/2)] = [cos(\theta/2), ({n}_{x}sin(\theta/2), {n}_{y}sin(\theta/2), {n}_{z}sin(\theta/2))]\)
对于任意四元数:
\( p = [w, (x, y, z)]\)
那么对于等式:
\( p' = qpq^{-1} = [cos(\theta /2), nsin(\theta/2)][w, (x, y, z)][cos(\theta /2), -nsin(\theta/2)]\)
展开后可以得到类似于三维旋转矩阵的东西。这说明四元数可以用在物体的旋转计算中。